–§–Њ—А–Љ–∞—В –њ–µ—А–µ–і–∞—З–Є –і–∞–љ–љ—Л—Е –≤ —Б–ї–Њ–ґ–љ—Л—Е —Б–Є—Б—В–µ–Љ–∞—Е —Г–њ—А–∞–≤–ї–µ–љ–Є—П

–Э–∞–њ—А–Є–Љ–µ—А, —Б–Є—Б—В–µ–Љ–∞ —Г–њ—А–∞–≤–ї–µ–љ–Є—П —Б–Њ—Б—В–Њ–Є—В –Є–Ј –љ–Є–Ј–Ї–Њ—Г—А–Њ–≤–љ–µ–≤—Л—Е –Ї–Њ–љ—В—А–Њ–ї–ї–µ—А–Њ–≤, —В—А–∞–љ—Б–њ–Њ—А—В–љ–Њ–є —Б–Є—Б—В–µ–Љ—Л –њ–µ—А–µ–і–∞—З–Є –і–∞–љ–љ—Л—Е –Є –Ї–Њ–Љ–њ—М—О—В–µ—А–∞, –Ї–Њ—В–Њ—А—Л–є –Њ—Б—Г—Й–µ—Б—В–≤–ї—П–µ—В –Љ–Њ–љ–Є—В–Њ—А–Є–љ–≥ –Є —Г–њ—А–∞–≤–ї–µ–љ–Є–µ –љ–µ–Ї–Њ—В–Њ—А—Л–Љ–Є –њ–∞—А–∞–Љ–µ—В—А–∞–Љ–Є. –Я—А–Є —Н—В–Њ–Љ –Ї–Њ–љ—В—А–Њ–ї–ї–µ—А—Л –Љ–Њ–≥—Г—В —Б–∞–Љ–Њ—Б—В–Њ—П—В–µ–ї—М–љ–Њ —А–µ—И–∞—В—М –Ј–∞–і–∞—З—Г –Є–Ј–Љ–µ—А–µ–љ–Є—П –Є —Г–њ—А–∞–≤–ї–µ–љ–Є—П –Њ–±—К–µ–Ї—В–Њ–Љ –Є —А–µ–∞–ї–Є–Ј–Њ–≤–∞–љ—Л –Њ–љ–Є –љ–∞ Atmega128. –Ґ—А–∞–љ—Б–њ–Њ—А—В–љ–∞—П —Б–Є—Б—В–µ–Љ–∞ —Б–Њ—Б—В–Њ–Є—В –Є–Ј –њ—А–µ–Њ–±—А–∞–Ј–Њ–≤–∞—В–µ–ї—П USB-RS485. –Я—А–Њ–≥—А–∞–Љ–Љ–∞ –Љ–Њ–љ–Є—В–Њ—А–Є–љ–≥–∞ –љ–∞–њ–Є—Б–∞–љ–∞ –љ–∞ Delphi 7. –Т—Б—С —Н—В–Њ –і–ї—П –Њ–њ—А–µ–і–µ–ї–µ–љ–љ–Њ—Б—В–Є.
–Х—Б–ї–Є –±—Л –Ї–Њ–ї–Є—З–µ—Б—В–≤–Њ –њ–µ—А–µ–і–∞–≤–∞–µ–Љ—Л—Е –њ–∞—А–∞–Љ–µ—В—А–Њ–≤ –Є–Ј –Ї–Њ–љ—В—А–Њ–ї–ї–µ—А–∞ –≤ –Ї–Њ–Љ–њ—М—О—В–µ—А –Њ–≥—А–∞–љ–Є—З–Є–≤–∞–ї–Њ—Б—М –і–≤—Г–Љ—П, —В—А–µ–Љ—П –Ј–љ–∞—З–µ–љ–Є—П–Љ–Є —В–µ–Љ–њ–µ—А–∞—В—Г—А—Л, —В–Њ –Њ—А–Є–≥–Є–љ–∞–ї—М–љ–Є—З–∞—В—М –Ј–і–µ—Б—М –љ–µ—З–µ–≥–Њ. –Ю–і–љ–∞–Ї–Њ, –µ—Б–ї–Є –Њ–±—К–µ–Ї—В —Г–њ—А–∞–≤–ї–µ–љ–Є—П, –і–∞–ґ–µ –њ—А–Є –Є–љ—В–µ–љ—Б–Є–≤–љ–Њ—Б—В–Є –њ–µ—А–µ–і–∞—З–Є —А–∞–Ј –≤ 2 —Б–µ–Ї—Г–љ–і—Л –Є–Љ–µ–µ—В, —Б–Ї–∞–ґ–µ–Љ 50 –њ–∞—А–∞–Љ–µ—В—А–Њ–≤ —Б–∞–Љ—Л—Е —А–∞–Ј–ї–Є—З–љ—Л—Е —В–Є–њ–Њ–≤, –і–∞ –њ—А–Є —Н—В–Њ–Љ –Ї–Њ–ї–Є—З–µ—Б—В–≤–Њ –Њ–±—К–µ–Ї—В–Њ–≤ —Г–њ—А–∞–≤–ї–µ–љ–Є—П —З–µ—В—Л—А–µ —И—В—Г–Ї–Є –Є –Њ–љ–Є –Њ–±—К–µ–і–Є–љ–µ–љ—Л –≤ –Њ–±—Й—Г—О —И–Є–љ—Г, —В–Њ –Ј–∞–і–∞—З–∞ —Д–Њ—А–Љ–∞—В–∞ –њ–µ—А–µ–і–∞—З–Є –і–∞–љ–љ—Л—Е –љ–µ –њ—А–Њ—Б—В–∞—П.
–Т–Њ—В, –і–ї—П –љ–∞–≥–ї—П–і–љ–Њ—Б—В–Є, –Љ–Њ–ґ–љ–Њ –њ–Њ—Б–Љ–Њ—В—А–µ—В—М, —Б–Ї–Њ–ї—М–Ї–Њ –њ–∞—А–∞–Љ–µ—В—А–Њ–≤ —Б–Њ–і–µ—А–ґ–Є—В –њ—А–Њ—Ж–µ—Б—Б —Г–њ—А–∞–≤–ї–µ–љ–Є—П –±–Є–Њ—А–µ–∞–Ї—В–Њ—А–Њ–Љ:
http://keklab.ru/biotools/remotelab24/page.php?proc=proc1
–Ь–Њ–ґ–љ–Њ –љ–∞–ґ–∞—В—М –Ї–љ–Њ–њ–Ї—Г Start, –∞ –Ј–∞—В–µ–Љ –£–њ—А–∞–≤–ї–µ–љ–Є–µ. –Т—Б—П —Б–Є—Б—В–µ–Љ–∞ —Б—В—А—Г–Ї—В—Г—А–љ–Њ –≤—Л–≥–ї—П–і–µ—В —В–∞–Ї:
http://keklab.ru/2011-02-13-20-20-54/69-sleep.html
–І—В–Њ –Є–Љ–µ–µ—В—Б—П –љ–∞ –њ—А–∞–Ї—В–Є–Ї–µ? –Я—А–Њ—В–Њ–Ї–Њ–ї MODBUS, –Ї–Њ—В–Њ—А—Л–є —П–≤–ї—П–µ—В—Б—П –љ–∞–і—Б—В—А–Њ–є–Ї–Њ–є –љ–∞–і –љ–Є–Ј–Ї–Њ—Г—А–Њ–≤–љ–µ–≤—Л–Љ –њ—А–Њ—В–Њ–Ї–Њ–ї–Њ–Љ RS-485. –Я—А–µ–і–њ–Њ–ї–Њ–ґ–Є–Љ, —З—В–Њ –њ—А–Њ–≥—А–∞–Љ–Љ–∞ –і–ї—П –Ї–Њ–љ—В—А–Њ–ї–ї–µ—А–∞ —А–µ–∞–ї–Є–Ј–Њ–≤–∞–љ–∞ –љ–∞ AVR Studio. –Я–µ—А–µ–Љ–µ–љ–љ—Л–µ, –Њ—А–≥–∞–љ–Є–Ј—Г—О—Й–Є–µ –њ—А–Њ—Ж–µ—Б—Б —Г–њ—А–∞–≤–ї–µ–љ–Є—П —Б–∞–Љ—Л–µ —А–∞–Ј–љ–Њ–Њ–±—А–∞–Ј–љ—Л–µ:
u16 TTLout; //–њ–Њ—А—В –≤—Л—Е–Њ–і–Њ–≤ TTL
u08 process_start; // 1 - —Б—В–∞—А—В –њ—А–Њ—Ж–µ—Б—Б–∞ 0 - —Б—В–Њ–њ
u32 EFT; // Elapsed Fermentation Time –≤ —Б–µ–Ї—Г–љ–і–∞—Е
float value[All_ADC_Ch]; //–Ш–Ј–Љ–µ—А—П–µ–Љ—Л–µ –њ–∞—А–∞–Љ–µ—В—А—Л
//вА¶вА¶вА¶вА¶вА¶вА¶вА¶
s16 mixer_value1;
–Ч–і–µ—Б—М –њ—А–Є–Љ–µ–љ–µ–љ—Л —Б–ї–µ–і—Г—О—Й–Є–µ —В–Є–њ—Л –і–∞–љ–љ—Л—Е, –Ї–Њ—В–Њ—А—Л–µ –њ–µ—А–µ–Њ–±–Њ–Ј–љ–∞—З–µ–љ—Л –і–ї—П —Г–і–Њ–±—Б—В–≤–∞ –љ–∞–њ–Є—Б–∞–љ–Є—П:
typedef unsigned short u16;
typedef unsigned char u08;
typedef signed short s16;
typedef unsigned long u32;
–Ф–ї—П –њ–µ—А–µ–і–∞—З–Є –≤—Б–µ—Е –њ–µ—А–µ–Љ–µ–љ–љ—Л—Е –≤ –Ї–Њ–љ—В—А–Њ–ї–ї–µ—А–µ –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ –Ї–∞–ґ–і—Г—О –Є–Ј –љ–Є—Е –њ–Њ —Б–Њ–Њ—В–≤–µ—В—Б—В–≤—Г—О—Й–µ–Љ—Г –Ј–∞–њ—А–Њ—Б—Г –њ—А–µ–Њ–±—А–∞–Ј–Њ–≤–∞—В—М –Є –њ–Њ–ї–Њ–ґ–Є—В—М –≤ –±—Г—Д–µ—А. –Ш–Љ–µ–љ–љ–Њ —В–∞–Ї —А–µ–∞–ї–Є–Ј—Г–µ—В—Б—П —Б–Љ—Л—Б–ї –Ј–∞–њ—А–Њ—Б–Њ–≤ –≤ –њ—А–Њ—В–Њ–Ї–Њ–ї–µ MODBUS. –Ф–ї—П —Б–Ї–Њ—А–Њ—Б—В–Є –Љ–Њ–ґ–љ–Њ —Б–≥—А—Г–њ–њ–Є—А–Њ–≤–∞—В—М –њ–µ—А–µ–Љ–µ–љ–љ—Л–µ –Є –њ–µ—А–µ–і–∞–≤–∞—В—М –Є—Е –Ї–∞–і—А–∞–Љ–Є. –Э–Њ –њ—А–Њ—Ж–µ–і—Г—А—Л –њ–Њ–Љ–µ—Й–µ–љ–Є—П –њ–µ—А–µ–Љ–µ–љ–љ–Њ–є –≤ –Ї–∞–і—А –љ–µ –Є–Ј–±–µ–ґ–∞—В—М. –Я—А–Є —Н—В–Њ–Љ –љ–∞–і–Њ –Ј–љ–∞—В—М —Б–Ї–Њ–ї—М–Ї–Њ –±–∞–є—В, –Ї–∞–ґ–і–∞—П –њ–µ—А–µ–Љ–µ–љ–љ–∞—П –Ј–∞–љ–Є–Љ–∞–µ—В –≤ –њ–∞–Љ—П—В–Є –Ї–Њ–љ—В—А–Њ–ї–ї–µ—А–∞.
–Э–∞ —В–Њ–Љ –Ї–Њ–љ—Ж–µ –њ–µ—А–µ–і–∞—З–Є, –≤ –Ї–Њ–Љ–њ—М—О—В–µ—А–µ, –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ –њ–Њ–ї—Г—З–µ–љ–љ—Л–є –њ–Њ —В—А–∞–љ—Б–њ–Њ—А—В—Г –Ї–∞–і—А –Є–љ—В–µ—А–њ—А–µ—В–Є—А–Њ–≤–∞—В—М, –Є —Н—В–Њ —В–Њ–ґ–µ –њ—А–Њ—Ж–µ–і—Г—А–∞, –Є –Њ–љ–∞ –Ј–∞–љ–Є–Љ–∞–µ—В –≤—А–µ–Љ—П.
–І—В–Њ –Љ–Њ–ґ–љ–Њ —Б–і–µ–ї–∞—В—М? –Ъ–∞–Ї —Г–њ—А–Њ—Б—В–Є—В—М –њ—А–Њ—Ж–µ—Б—Б —Д–Њ—А–Љ–Є—А–Њ–≤–∞–љ–Є—П –Ї–∞–і—А–∞ –Є –њ–Њ–≤—Л—Б–Є—В—М —Б–Ї–Њ—А–Њ—Б—В—М. –Х—Б–ї–Є –і–ї—П –≤–µ—А—Е–љ–µ–є –Љ–∞—И–Є–љ—Л —Б–Ї–Њ—А–Њ—Б—В—М –љ–µ –≤–∞–ґ–љ–∞, —В–Њ –і–ї—П –Љ–Є–Ї—А–Њ–њ—А–Њ—Ж–µ—Б—Б–Њ—А–∞, –Ї–Њ—В–Њ—А—Л–є –Ї—А–Њ–Љ–µ —В—А–∞–љ—Б–њ–Њ—А—В–љ—Л—Е –Ј–∞–і–∞—З —А–µ—И–∞–µ—В –Ј–∞–і–∞—З–Є —Г–њ—А–∞–≤–ї–µ–љ–Є—П —Н—В–Њ –≤–∞–ґ–љ–Њ.
–Ш —В–∞–Ї, –≤–љ–Є–Ј—Г, –≤ –њ—А–Њ–≥—А–∞–Љ–Љ–µ –і–ї—П –Ї–Њ–љ—В—А–Њ–ї–ї–µ—А–∞ –≤—Б–µ –њ–µ—А–µ–Љ–µ–љ–љ—Л–µ, –љ–µ–Њ–±—Е–Њ–і–Є–Љ—Л–µ –Ї–∞–Ї –і–ї—П —Г–њ—А–∞–≤–ї–µ–љ–Є—П, —В–∞–Ї –Є –і–ї—П —В—А–∞–љ—Б–њ–Њ—А—В–∞ —А–∞—Б–њ–Њ–ї–∞–≥–∞—О—В—Б—П –≤ —Б—В—А—Г–Ї—В—Г—А–µ. –°–Њ–Ј–і–∞–µ–Љ –µ—С:
typedef struct sbuf //—Б—В—А—Г–Ї—В—Г—А–∞ –і–ї—П –љ–µ–њ—А–µ—А—Л–≤–љ–Њ–≥–Њ —А–∞–Ј–Љ–µ—Й–µ–љ–Є—П –њ–µ—А–µ–Љ–µ–љ–љ—Л—Е –≤ –њ–∞–Љ—П—В–Є
{
u16 TTLout;
u08 process_start;
u32 EFT;
float value[All_ADC_Ch];
//вА¶вА¶вА¶вА¶вА¶вА¶вА¶вА¶
s16 mixer_value1;
u08 zero;
} tbuf;
tbuf buf; //–Њ–±—К—П–≤–ї—П–µ–Љ –њ–µ—А–µ–Љ–µ–љ–љ—Г—О –і–∞–љ–љ–Њ–≥–Њ —В–Є–њ–∞.
–Т —В–µ–ї–µ –Њ—Б–љ–Њ–≤–љ–Њ–є –њ—А–Њ–≥—А–∞–Љ–Љ—Л –і–ї—П –Ї–Њ–љ—В—А–Њ–ї–ї–µ—А–∞ –Њ–±—А–∞—Й–µ–љ–Є–µ –Ї –Ї–Њ–љ–Ї—А–µ—В–љ–Њ–є –њ–µ—А–µ–Љ–µ–љ–љ–Њ–є —Н—В–Њ–є —Б—В—А—Г–Ї—В—Г—А—Л –±—Г–і–µ—В –≤—Л–≥–ї—П–і–µ—В—М —В–∞–Ї:
buf.value[0] = 7.4;
–І—В–Њ —Н—В–Њ –і–∞–µ—В? –Р —В–Њ, —З—В–Њ –њ–Њ—Б–ї–µ –Ї–Њ–Љ–њ–Є–ї—П—Ж–Є–Є –≤—Б–µ –њ–µ—А–µ–Љ–µ–љ–љ—Л–µ, —А–∞–Ј–љ–Њ–≥–Њ —В–Є–њ–∞ —А–∞—Б–њ–Њ–ї–∞–≥–∞—О—В—Б—П –≤ –њ–∞–Љ—П—В–Є –љ–µ–њ—А–µ—А—Л–≤–љ–Њ, –Є–Љ–µ–љ–љ–Њ –≤ —В–Њ–є –њ–Њ—Б–ї–µ–і–Њ–≤–∞—В–µ–ї—М–љ–Њ—Б—В–Є, –Ї–∞–Ї –Њ–љ–Є –Њ–±—К—П–≤–ї–µ–љ—Л –≤ —Б—В—А—Г–Ї—В—Г—А–µ. –Ъ–∞–ґ–і–∞—П –Є–Ј –љ–Є—Е –Ј–∞–љ–Є–Љ–∞–µ—В —Б–≤–Њ–µ –Ї–Њ–ї–Є—З–µ—Б—В–≤–Њ –±–∞–є—В, –≤–њ–Њ–ї–љ–µ –Њ–њ—А–µ–і–µ–ї–µ–љ–љ–Њ–µ.
–Ґ–µ–њ–µ—А—М –≤–µ—А–љ–µ–Љ—Б—П –Ї —В—А–∞–љ—Б–њ–Њ—А—В–љ–Њ–є –њ—А–Њ–±–ї–µ–Љ–µ. –Я—А–Њ—Ж–µ—Б—Б —Г–њ—А–∞–≤–ї–µ–љ–Є—П –Ј–∞–љ–Є–Љ–∞–µ—В—Б—П —Б–≤–Њ–Є–Љ –і–µ–ї–Њ–Љ, –≤ –Њ–њ—А–µ–і–µ–ї–µ–љ–љ—Л–є –Љ–Њ–Љ–µ–љ—В –љ–∞–Љ –љ–∞–і–Њ —Б—Д–Њ—А–Љ–Є—А–Њ–≤–∞—В—М –Ї–∞–і—А –Є –њ–µ—А–µ–і–∞—В—М –µ–≥–Њ –њ–Њ RS-485. –Ґ–µ–њ–µ—А—М —Н—В–Њ –њ—А–Њ—Б—В–Њ:
startbuf = &buf; //–∞–і—А–µ—Б –љ–∞—З–∞–ї–∞ –Ї–∞–і—А–∞
stopbuf = &buf.zero; // –∞–і—А–µ—Б –Ї–Њ–љ—Ж–∞ –Ї–∞–і—А–∞, –њ–µ—А–µ–Љ–µ–љ–љ–∞—П zero, –њ—А–Њ—Б—В–Њ –Њ–±–Њ–Ј–љ–∞—З–∞–µ—В –≤ —Б—В—А—Г–Ї—В—Г—А–µ –љ–µ–Ј–љ–∞—З–∞—Й—Г—О –њ–µ—А–µ–Љ–µ–љ–љ—Г—О.
 
–Ґ–µ–њ–µ—А—М –≤—Б—П —Б—В—А—Г–Ї—В—Г—А–∞ —Н—В–Њ –Њ–і–Є–љ –Ї–∞–і—А, –Ї–Њ—В–Њ—А—Л–є –Љ–Њ–ґ–љ–Њ –њ–µ—А–µ–і–∞—В—М –≤ —Ж–Є–Ї–ї–µ, –Ј–љ–∞—П –∞–і—А–µ—Б –љ–∞—З–∞–ї–∞ –Є –Ї–Њ–љ—Ж–∞. –Ы–Є–±–Њ –Љ–Њ–ґ–љ–Њ —А–∞–Ј–±–Є–≤–∞—В—М –≤—Б—О —Б—В—А—Г–Ї—В—Г—А—Г –љ–∞ –Љ–µ–љ—М—И–Є–µ –њ–Њ —А–∞–Ј–Љ–µ—А—Г –Ї–∞–і—А—Л, —А–∞–љ–ґ–Є—А—Г—П –Є—Е –њ–Њ —Б—В–µ–њ–µ–љ–Є –≤–Њ—Б—В—А–µ–±–Њ–≤–∞–љ–љ–Њ—Б—В–Є –љ–∞ –≤–µ—А—Е–љ–µ–є –Љ–∞—И–Є–љ–µ.
–Э–Њ —Н—В–Њ –њ–Њ–ї –і–µ–ї–∞. –Ъ–∞–Ї –≤ Delphi 7 –њ–Њ–ї—Г—З–Є—В—М —Н—В–Њ—В –Ї–∞–і—А –Є —В–∞–Ї –ґ–µ –ї–µ–≥–Ї–Њ –µ–≥–Њ –Є–љ—В–µ—А–њ—А–µ—В–Є—А–Њ–≤–∞—В—М? –Ґ–∞–Љ —В–Њ–ґ–µ –µ—Б—В—М —Б–≤–Њ–Є —Е–Є—В—А–Њ—Б—В–Є. –Т–Њ—В –∞–љ–∞–ї–Њ–≥–Є—З–љ–∞—П —Б—В—А—Г–Ї—В—Г—А–∞. –Х—Б–ї–Є –±—Л –Ї–Њ–Љ–њ–Є–ї—П—В–Њ—А Delphi 7 –њ–Њ–Ј–≤–Њ–ї—П–ї —А–µ–∞–ї–Є–Ј–Њ–≤—Л–≤–∞—В—М C-—И–љ—Л–µ –≤—Б—В–∞–≤–Ї–Є, —В–Њ –Є –њ–µ—А–µ–њ–Є—Б—Л–≤–∞—В—М –љ–Є—З–µ–≥–Њ –љ–µ –љ–∞–і–Њ. –Р —В–∞–Ї —А—Г—З–Ї–∞–Љ–Є –њ–Њ—А–∞–±–Њ—В–∞–µ–Љ –Є –Њ–±–Њ–Ј–љ–∞—З–Є–Љ —В–Є–њ—Л, –Ї–Њ—В–Њ—А—Л–µ –Є–Љ–µ—О—В —Б–≤–Њ–Є –∞–љ–∞–ї–Њ–≥–Є –Ї–∞–Ї –≤ –°, —В–∞–Ї –Є –≤ Delphi 7:
type
TBuf = record
TTLout: word;
process_start: byte ;
EFT: cardinal;
value: array [0..All_ADC_Ch] of single;
//вА¶вА¶вА¶вА¶вА¶вА¶вА¶вА¶
mixer_value1: smallint;
zero: byte;
end;
–Т –Њ—Б–љ–Њ–≤–љ–Њ–є –њ—А–Њ–≥—А–∞–Љ–Љ–µ –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ –Њ–±—К—П–≤–Є—В—М –њ–µ—А–µ–Љ–µ–љ–љ—Г—О –і–∞–љ–љ–Њ–≥–Њ —В–Є–њ–∞:
buf:TBuf;
–Ш –Њ–±—А–∞—Й–µ–љ–Є–µ –Ї –Ї–Њ–љ–Ї—А–µ—В–љ–Њ–є —З–∞—Б—В–Є –Ј–∞–њ–Є—Б–Є –±—Г–і–µ—В –≤—Л–≥–ї—П–і–µ—В—М –Ї–∞–Ї:
buf.value [0]:=7.4;
–Х—Б–ї–Є —В—А–∞–љ—Б–њ–Њ—А—В –Њ—А–≥–∞–љ–Є–Ј–Њ–≤–∞–љ –љ–∞–њ—А–Є–Љ–µ—А, —Б –њ–Њ–Љ–Њ—Й—М—О –њ—А–µ–Њ–±—А–∞–Ј–Њ–≤–∞—В–µ–ї—П USB-RS485 –љ–∞ –Њ—Б–љ–Њ–≤–µ FTDI, —В–Њ –Є—Б–њ–Њ–ї—М–Ј—Г—П –±–Є–±–ї–Є–Њ—В–µ–Ї–Є, –Љ–Њ–ґ–љ–Њ –Њ—А–≥–∞–љ–Є–Ј–Њ–≤–∞—В—М –њ–Њ–ї—Г—З–µ–љ–Є–µ –љ–∞—И–µ–≥–Њ –Ї–∞–і—А–∞ –Є–Ј –Ї–Њ–љ—В—А–Њ–ї–ї–µ—А–∞:
Const
numbyteframe = 4096; // —А–∞–Ј–Љ–µ—А –≤—Б–µ–≥–Њ —В—А–∞–љ—Б–њ–Њ—А—В–љ–Њ–≥–Њ¬† –±—Г—Д–µ—А–∞, –Є–ї–Є –Ї–∞–і—А–∞
var
res:integer; // –Ї–Њ–ї–Є—З–µ—Б—В–≤–Њ –њ—А–Є–љ—П—В—Л—Е –±–∞–є—В –≤ –Ї–∞–і—А–µ
bufdata: array [0.. numbyteframe - 1] of byte; // –≤—А–µ–Љ–µ–љ–љ—Л–є –±—Г—Д–µ—А –і–ї—П —В—А–∞–љ—Б–њ–Њ—А—В–∞
FT_Read(ftdi.FT_Handle, @bufdata, numbyteframe, @res); //–±–Є–±–ї–Є–Њ—В–µ—З–љ–∞—П —Д—Г–љ–Ї—Ж–Є—П –њ—А–Є–µ–Љ–∞ –±—Г—Д–µ—А–∞ –њ–Њ USB
–Ч–∞—В–µ–Љ –њ—А–Њ–≤–µ—А–Є–ї–Є –љ–∞ –Њ—И–Є–±–Ї–Є –Є –њ–µ—А–µ–і–∞–ї–Є –≤ —Б—В—А—Г–Ї—В—Г—А—Г:
move(bufdata,buf.TTLout,numbyteframe);
–Я–Њ—Б–ї–µ —Н—В–Њ–≥–Њ –≤—Б–µ –њ–µ—А–µ–Љ–µ–љ–љ—Л–µ —Б—В—А—Г–Ї—В—Г—А—Л –њ–Њ–ї—Г—З–Є–ї–Є —Б–≤–Њ—О –њ—А–∞–≤–Є–ї—М–љ—Г—О –Є–љ—В–µ—А–њ—А–µ—В–∞—Ж–Є—О. –Х—Б–ї–Є –њ—А–µ–і–њ—А–Є–љ—П—В—М –њ—А–Њ–≤–µ—А–Ї—Г –±—Г—Д–µ—А–∞ –љ–∞ –ї–µ—В—Г, —В–Њ –Њ–њ–µ—А–∞—Ж–Є—О move —В–∞–Ї –ґ–µ –Љ–Њ–ґ–љ–Њ –Є–Ј–±–µ–ґ–∞—В—М –Є –њ–µ—А–µ–і–∞–≤–∞—В—М —Б—А–∞–Ј—Г –Є–Ј FTDI –≤ –њ–µ—А–µ–Љ–µ–љ–љ—Г—О buf. –Я—А–∞–≤–і–∞, –≤ —Б–ї—Г—З–∞–µ –љ–∞—А—Г—И–µ–љ–Є—П —Б–≤—П–Ј–Є, –њ–µ—А–µ–Љ–µ–љ–љ—Л–µ, –Ј–∞–љ–Є–Љ–∞—О—Й–Є–µ –≤ –њ–∞–Љ—П—В–Є –±–Њ–ї–µ–µ –Њ–і–љ–Њ–≥–Њ –±–∞–є—В–∞ –Љ–Њ–≥—Г—В –Є–љ—В–µ—А–њ—А–µ—В–Є—А–Њ–≤–∞—В—М—Б—П –љ–µ –њ—А–∞–≤–Є–ї—М–љ–Њ.
–Э–∞ —Н—В–Њ–Љ, –њ—А–∞–≤–і–∞ –љ—О–∞–љ—Б—Л –љ–µ –Ї–Њ–љ—З–∞—О—В—Б—П, –µ—Б—В—М –µ—Й–µ –Њ–і–Є–љ, —Б—Г—Й–µ—Б—В–≤–µ–љ–љ—Л–є. –Ъ–∞–Ї –љ–∞—Б—В—А–Њ–Є—В—М –Ї–Њ–Љ–њ–Є–ї—П—В–Њ—А, —З—В–Њ–±—Л –Њ–љ –љ–µ –≤—Л—А–∞–≤–љ–Є–≤–∞–ї –њ–µ—А–µ–Љ–µ–љ–љ—Л–µ –њ–Њ–і 32 –±–∞–є—В–∞? –Э–µ –Ј–љ–∞—О –Ї–∞–Ї –≤ –°++, –∞ –≤ Delphi —Н—В–Њ –і–µ–ї–∞–µ—В—Б—П —В–∞–Ї:
Project + Options + Compiler.
–Т –њ–Њ–ї–µ Code generation –љ–∞–і–Њ –≤—Л–±—А–∞—В—М –њ–∞—А–∞–Љ–µ—В—А:
Record field alignment = 1
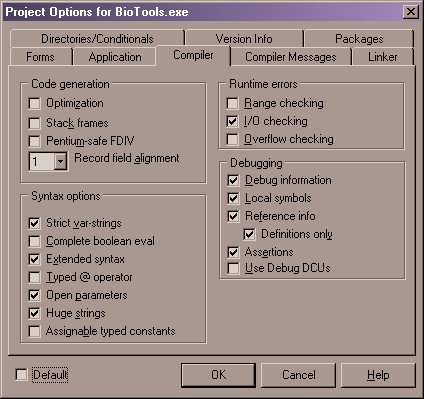
–Ґ–µ–њ–µ—А—М –њ–µ—А–µ–Љ–µ–љ–љ—Л–µ —В–Є–њ–∞ byte, –љ–µ –±—Г–і—Г—В —А–∞–Ј–і—А–∞–ґ–∞—В—М 32-—Е —А–∞–Ј—А—П–і–љ—Л–є –њ—А–Њ—Ж–µ—Б—Б–Њ—А.
–Ю–±–љ–Њ–≤–ї–µ–љ–Њ (23.02.2013 10:21)
